
Smart Hangar
The Smart Hangar Project aims at addressing the Defence Challenge on "Cyber-physical system to assist in, or potentially automate, manoeuvring of aircraft between a hangar and apron".
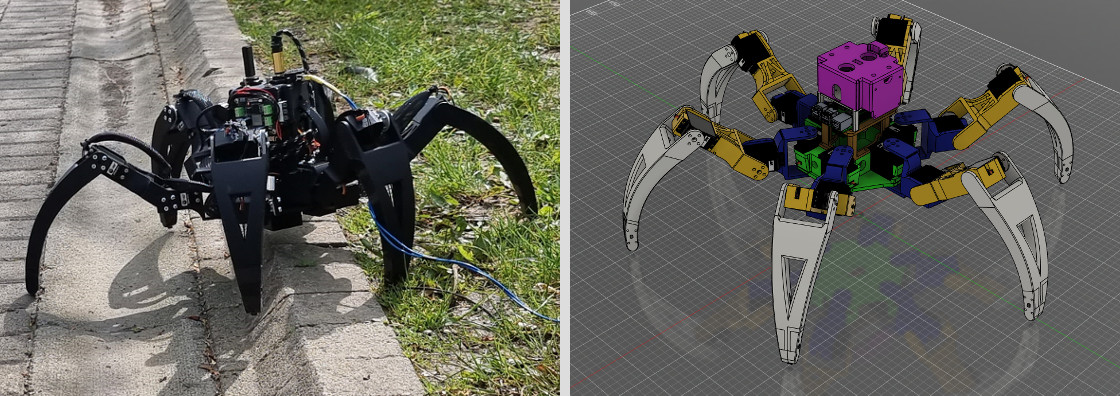
Active Perception
The aim of this research is to determine robot’s actions that minimizes the estimation uncertainty that affects the robot sensors and actuators, in order to optimize the robot localization.
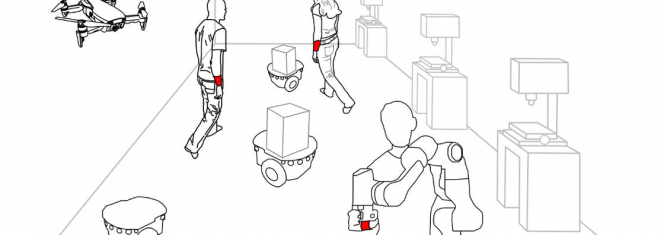
Shared Autonomy
Shared Autonomy for Heterogeneous Human-Robot Teams. The aim of this research is to fuse the unparalleled cognitive skills of humans with the capabilities of different robots creating a team that safely and intuitively works together in highly dynamic scenarios such as the industrial and the agricultural ones.
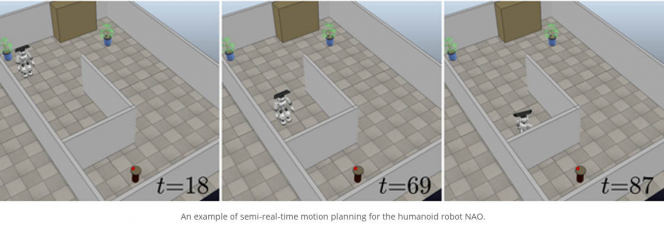
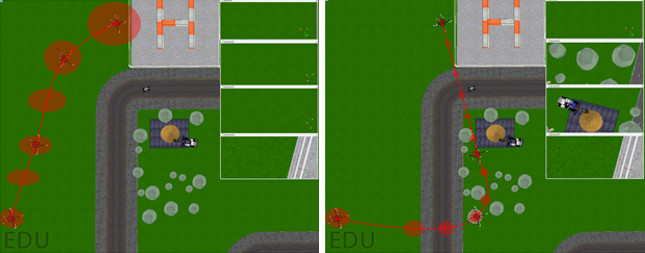
Real-time Motion Planning
Motion planning can be defined as the problem of finding a motion, between two rest robot configurations, that does not collide with any obstacle in the environment.

Robotic Manipulation with Mobile Robots
Here at Maynooth University, we are interested in robotic manipulation with mobile robots.

CoBot for Dairy Quality
The “CoBot for Dairy Quality” project evaluates the application of collaborative robotics (Cobots) (in conjunction with a vision system) to robustly and reproducibly mix dairy powders into rehydrated products